| PIC24F64GA002偲FreeRTOS | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 栚丂師 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 偼偠傔偵 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 偟偽傜偔尒側偄偆偪偵PIC偲偐AVR側偳偺僠僢僾儅僀僐儞偺敪揥偼挊偟偔丄32價僢僩斉傑偱尰傟傞巒枛偱偡丅僠僢僾儅僀僐儞偼扨撈偱巊偭偰偙偦 埿椡傪敪婗偡傞偲峫偊偰偄偨偺偱RTOS偼晄梫偲巚偭偰偄傑偟偨丅 偲偙傠偑32bit偵側傟偽Linux偑摦偒傑偡偟丄堦斒揑側 PIC偁傞偄偼 AVR偵偼 FreeRTOS偑偁傞丅 16bit偺擻椡偱偁傟偽僾儕僄儞僥傿僽惂屼偟偰傕幚梡揑偱偁傞偲巚傢傟丄偙偙偱偼 PIC16bit偱 堦斣埨壙側 PIC24FJ64GA002偱帋嶌偡傞丅 奐敪僔僗僥儉偼 Microchip幮惢 MPLAB偲C30僐儞僷僀儔傪巊梡偡傞丅 僾儘僌儔儅偲僨僶僢僈偼摨條偵 Microchip幮惢 PICkit3傪巊梡偡傞丅 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 奣梫 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| PIC偼僠僢僾儅僀僐儞偱偁傝丄僠僢僾偱暵嵔揑偵姰惉偟偰偄傞偺偱丄奜晹晹昳傪側傞傋偔巊梡偣偢偵嶌傞帠傪栚昗偲偡傞丅 壗偑椙偄偐偲巚偭偨偑丄偝偟摉偨偭偰儀儞僠儅乕僋偺偮傕傝偱FFT傪摦偐偡丅僠僢僾偺僴乕僪偲偟偰偼僨僕僞儖擖弌椡丄UART丄傾僫儘僌擖椡丄僷儖僗暆曄挷偁偨傝傪僒億乕僩偡傞梊掕偱偡丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| FreeRTOS | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| FreeRTOS偺奣梫偼偙偙偵偁傝傑偡丅 傑偢FreeRTOS偺僨儌僾儘僌儔儉偐傜弌敪偡傞丅僨儌偲偟偰PIC24FJ128GA010偑偁傞丅偙傟傪PIC24FJ64GA002偱摦偐偝側偗傟偽側傜側偄丅僨儌丒僨傿儗僋僩儕偵偁傞FreeRTOSConfig.h偱掕媊偟偰偄傞 #include <p24FJ128GA010.h>丂傪師偺峴偱擖傟懼偊傞丅 #include <p24FJ64GA002.h> |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 偙傟偱椙偄偐偲巚傢傟偨偑丄PIC24FJ128GA010偺100pin偵懳偟偰PIC24FJ64GA002偼28pin偟偐側偄丅 GA010偱偼傎偲傫偳昁梫側偐偭偨丄傗傗偙偟偄丄pin妱晅傪GA002偱偼峴傢側偗傟偽側傜側偄丅 28pin偟偐側偄偺偱暋悢偺婡擻偐傜堦偮傪pin偵妱傝晅偗側偗傟偽側傜側偄丅 傑偨丄堦晹偺婡擻乮JTAG)偼巊梡偟側偄愝掕偵偟偰丄PICkit3傪梡偄偰僨僶僢僋偟偰偄傞丅 偙傟傜偼MPLAB偺Configure=>Select Device...偲Configure=>Configureation Bits...偱巜掕偟捈偣偽 帺摦揑偵僾儘僕僃僋僩偵庢傝崬傑傟傞偑丄pin妱晅偼柧帵揑偵僐乕僪偱巜掕偟側偗傟偽側傜側偄丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 偙偺僨儌偺丂Configuration Bits... 椺 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| PIC24FJ64GA002偺pin妱晅昞 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| FreeRTOS偺僨儌僾儘僌儔儉偵偼壓婰偺傕偺偑偁傞 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
偡偭偒傝偝偣偨忬懺偱奺僀儞僾儕儊儞僩傪峴偄丄嵟屻偵FlashCoRoutine傪擖傟傞丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Heap媦傃stack | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| FreeRTOS偑巊梡偡傞Heap媦傃僗僞僢僋偼FreeRTOSConfig.倛偵偁傞configTOTAL_HEAP_SIZE偱掕媊偡傞丅偙偺Heap斖埻偱stack偲倫倴PortMalloc摍偺儊儌儕偺庢摼偑幚峴偝傟傞丅偙偙偱偼帠幚忋儊儌儕乕儅僱乕僕儊儞僩傪偟偰偄側偄Heap1傪嵦梡偟偰偄傞乮愢柧偼偙偙偵偁傝傑偡乯丄偙傟偼嫮偔悇彠偝傟傑偡丅崱傑偱偺僩儔僽儖僔儏乕僩偺宱尡忋丄彮側偐傜偸僩儔僽儖偑儊儌儕乕儅僱乕僕儊儞僩偵婲場偡傞傕偱偁偭偨偐傜偱偡丅 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| FFT | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 倓倱PIC偵偼DSP梡FFT偑Microchip偐傜採嫙偝傟偰偄傞丅偙傟偼屌掕彫悢揰墘嶼偱偁傝側偑傜廩暘側僟僀僫儈僢僋儗儞僕傪帩偮Q15,Q16Format偱婰弎偝傟偰偄傞丅巆擮側偑傜PIC24F偱偼丄偙偺DSP柦椷偼搵嵹偝傟偰偄側偄丅偲偄偆傛傝丄倓倱PIC偐傜DSP柦椷傪偼偢偟偨偺偑PIC24F偺傛偆偩丅 偦偙偱丄巊偊偦偆側Tom Roberts偝傫偺屌掕彫悢揰墘嶼FFT傪嵹偣偰傒偨丅怓乆側棟桼偐傜暋慺FFT傪巊偄偨偄偺偱偡偑丄偙偙偱偼丄偳偙傑偱巊梡偱偒傞偐傪専徹偡傞堄枴偱丄摨崼偝傟偰偄傞幚悢FFT傪巊偄幚峴帪娫傪寁偭偰傒偨丅 PIC24FJ64GA002偺RAM梕検偼8Kb偁傝丄敿暘偺4k傪僨乕僞偵巊梡偡傞偲偡傟偽丄1僨乕僞偼16bit2僶僀僩偱偁傞偐傜丄2048揰傑偱偺寁嶼偑偱偒傞偙偲偵側傞丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 偁傑傝憗偔偼側偄偑丄僋儘僢僋廃攇悢暲傒偺懍搙偼弌偰偄傞丅傑偁傑偁偐側丅 偙偙偐傜丄偍梀傃偱傾僫儘僌擖椡偐傜壒惡256揰乮40khz偱6.4msec乯庢傝崬傒屻儕傾儖僞僀儉偱悢懷堟偺廃攇悢嫮搙傪PWM傪巊偭偰LED偱敪岝嫮搙偱帵偡傕偺傪惢嶌偡傞丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Tom Roberts偝傫偺FFT傪堏怉帪偺拲堄揰
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 丂偙偺僞僗僋偼儘乕僇儖曄悢傕偦傟側傝偵巊梡偡傞偺偱丄僞僗僋偺嵟彫僗僞僢僋検偵僾儔僗侾侽侽bytes掱搙憹傗偟偰抲偐側偗傟偽側傜側偄丅幹懌側偑傜丄昁梫検偓傝偓傝偵愝掕偟偨応崌丄偙傟偵乮昁梫側傜乯妱傝崬傒偑巊梡偡傞僗僞僢僋傕峫椂偟側偗傟偽側傜側偄丅 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
/* Short test program to accompany fix_fft.c */
/*-------- FreeRTOS defines ---------*/
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include "fft.h"
static void vFFTTask( void *pvParameters );
#define fftQUEUE_SIZE 3
extern xQueueHandle xFFTQueue;
__attribute__((far)) short x[N*2];
#define N 256 /* ( FFT_SIZE) */
#define log2N 8 /**/
xQueueHandle xStartFFTTask( void )
{
xQueueHandle xFFTQueue;
/* 僨乕僞庴怣摨婜梡懸偪峴楍偺惗惉 */
xFFTQueue = xQueueCreate( fftQUEUE_SIZE, sizeof( xFFTMessage ) );
丂丂/* 僞僗僋偺惗惉 */
xTaskCreate( vFFTTask, ( signed portCHAR * ) "FFT",
configMINIMAL_STACK_SIZE+100, NULL, tskIDLE_PRIORITY + 1, NULL );
return xFFTQueue;
}
/*-------------------------------------*/
static void vFFTTask(void *pvParameters)
{
xFFTMessage xFFT;
static int i, j, scale;
static unsigned diff;
short *fx;
/* 僾儔僀儀乕僩丒僄儕傾偐傜儊儌儕傪庢摼偡傞丂*/
fx = pvPortMalloc(sizeof(short)*N);
/* 僞僗僋儖乕僾 */
while(1){
/* 僨乕僞偺廂廤傪懸偮 */
xQueueReceive( xFFTQueue, &xFFT, portMAX_DELAY );
/* 僟僽儖僶僢僼傽偐傜僨乕僞傪庢摼偡傞 */
j = (xFFT.fftSel == 0)? 0 : 256;
/*丂幚悢曄姺梡偵暲傋懼偊傞丂*/
/*丂晞崋晅偒2恑偵曄姺偟12288偵惓婯壔偡傞丂*/
for (i=0; N; i++){
if (i & 0x01))
fx[(N+i)>>1] = (x[i+j]-512)*24;;
elsee
fx[i>>1] = (x[i+j]-512)*24;;
}
/* FFT曄姺 */
fix_fftr(fx, log2N, 0);
#if SPECTRUM
/* 奺廃攇悢椞堟偺擇忔憤榓傪媮傔傞丂*/
for(i=0; i<4; i++) sp.spec[i] = 0;
for (i= 1; i< 4; i++) sp.spec[0] += ((long)fx[i]*fx[i]+fx[i+N/2]*fx[i+N/2]);
for (i= 4; i<16; i++) sp.spec[1] += ((long)fx[i]*fx[i]+fx[i+N/2]*fx[i+N/2]);
for (i=16; i<32; i++) sp.spec[2] += ((long)fx[i]*fx[i]+fx[i+N/2]*fx[i+N/2]);
for (i=32; i<64; i++) sp.spec[3] += ((long)fx[i]*fx[i]+fx[i+N/2]*fx[i+N/2]);
/*丂暯嬒媦傃暯曽崻乮RMS)傪媮傔柧搙昞帵偡傞僞僗僋傊搉偡丂*/
xQueueSend( xFFTWQueue, &sp, portMAX_DELAY );
#endif
/* 媡曄姺偱尦偵栠偡丂*/
scale = fix_fftr(fx, log2N, 1);
/* 幚悢曄姺梡偺僨乕僞傪暲傋懼偊偰尦偵栠偡丂
惓婯壔乮12288乯傪栠偟晞崋側偟2恑悢偵栠偡丂*/
int k = (j == 0)? 512 : 768;
for (i=0; i<N; i++) {
if (i & 0x01)
x[i+k] = (fx[(N+i)>>1] << scale)/24+512;
else
x[i+k] = (fx[ i >>1] << scale)/24+512;
}
}
}
/*
暯嬒媦傃暯曽崻乮RMS)傪媮傔柧搙昞帵偡傞僞僗僋
偙傟偼帪娫撪偵廔傢傜側偄丅偦偙偱棴傑偭偨QUEUE傪
娫堷偒嵟怴偺僨乕僞偵摨婜偡傞丅
*/
static void vPwrTask(void *pvParameters)
{
Spectrum sp;
while(1){
if (xQueueReceive( xFFTWQueue, &sp, portMAX_DELAY) == pdTRUE){
while( xQueueReceive( xFFTWQueue, &sp, 0) == pdTRUE);
sp.spec[0] = sqrt(sp.spec[0] / 3);
sp.spec[1] = sqrt(sp.spec[1] / 12);
sp.spec[2] = sqrt(sp.spec[2] / 16);
sp.spec[3] = sqrt(sp.spec[3] / 32);
SetDCOC2PWM((long)(PR2+1)*(PR2-1-sp.spec[0])/160);
SetDCOC3PWM((long)(PR2+1)*(PR2-1-sp.spec[1])/160);
SetDCOC4PWM((long)(PR2+1)*(PR2-1-sp.spec[2])/160);
SetDCOC5PWM((long)(PR2+1)*(PR2-1-sp.spec[3])/160);
}
}
} |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 丂偍傗丄僷儚乕僗儁僋僩儖傪寁嶼偡傞偵偼憢娭悢偑偐偐偭偰偄側偄丠偙傟偼僥僗僩梡偵媡曄姺偟偰壒惡弌椡偡傞偨傔偱偁傝丄偳偙傑偱巊偊傞偐偺専徹側偺偱埆偟偐傜偢丅 側偍丄fix_fftr偺廋惓偟偨傕偺傪師偵帵偡丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
int fix_fftr(short f[], int m, int inverse)
{
int i, N = 1亙亙(m-1), scale = 0;
short tt, *fr=&f[0], *fi=&f[N];
short n, n2, tsin, tcos;
short real1, imag1, real2, imag2;
long tr, ti, sr, si;
n = N*2;
n2 = n/2;
if (inverse){
for(i=1; i亙n/4; i++){
tsin = Sinewave[(1024/n)*i];
tcos = Sinewave[(1024/n)*i+256];
tr = fr[i]-fr[n2-i];
ti = fi[i]+fi[n2-i];
sr = ((tr*(32767-tsin)+ti*tcos)/2) >> 15;
si = ((ti*(32767-tsin)-tr*tcos)/2) >> 15;
real1 = fr[ i] - sr;
imag1 = fi[ i] - si;
real2 = fr[n2-i] + sr;
imag2 = fi[n2-i] - si;
fr[ i] = real1;
fi[ i] = imag1;
fr[n2-i] = real2;
fi[n2-i] = imag2;
}
fr[0] = (fr[0] + fr[n2])/2;
fi[0] = (fi[0] - fi[n2])/2;
scale = fix_fft(fi, fr, m-1, inverse);
}
if (! inverse){
scale = fix_fft(fi, fr, m-1, inverse);
for(i=1; i亙n/4; i++){
tsin = Sinewave[(1024/n)*i];
tcos = Sinewave[(1024/n)*i+256];
tr = fr[i]-fr[n2-i];
ti = fi[i]+fi[n2-i];
sr = ((tr*(32767-tsin)-ti*tcos)/2) >> 15;
si = ((ti*(32767-tsin)+tr*tcos)/2) >> 15;
real1 = fr[ i] - sr;
imag1 = fi[ i] - si;
real2 = fr[n2-i] + sr;
imag2 = fi[n2-i] - si;
fr[ i] = real1;
fi[ i] = imag1;
fr[n2-i] = real2;
fi[n2-i] = imag2;
}
fr[n2] = fr[0];
fi[n2] = -fi[0];
}
return scale;
} |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 傾僫儘僌擖椡 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| PIC24F偺AD僐儞僶乕僞偼懡偔偺儌乕僪傪旛偊偰偄偁傞偑丄偙偙偱偼僞僀儅乕偵埶傞廃婜庢傝崬傒傪椺偲偟偰庢傝忋偘傞丅 僞僀儅俁傪庢傝崬傒廃婜敪惗尮偲偟偰巊梡偡傞丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| AD僐儞僶乕僞愝掕娭悢 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
#define USE_AND_OR
#include "adc.h"
#include "timer.h"
int adc_setup(unsigned portBASE_TYPE ports)
{
/* 僞僀儅3傪撪晹僋儘僢僋16MHz丄僾儕僗働乕儔8 (=>2Mhz)偵愝掕
僩儕僈廃婜傪2Mhz/200=10Khz偲偡傞*/
OpenTimer3(T3_ON | T3_PS_1_8 | T3_SOURCE_INT, 200-1);
/* 奺僩儕僈帪丄CH0媦傃CH1偺ADC僒儞僾儕儞僌傪幚峴偡傞
16夞偺曄姺乮2ch傪8夞乯偛偲偵妱傝崬傒傪敪惗偡傞丅
*/
if(ports==2){
OpenADC10(
ADC_MODULE_ON | ADC_CLK_TMR3 | ADC_AUTO_SAMPLING_ON ,
ADC_SCAN_ON | ADC_INTR_8_CONV,
ADC_SAMPLE_TIME_5 | ADC_CONV_CLK_6Tcy,
~(ENABLE_AN1_DIG | ENABLE_AN0_DIG),
ADC_SCAN_AN1 | ADC_SCAN_AN0);
}
SetChanADC10(0);
/* 妱傝崬傒弶婜壔 */
ConfigIntADC10(ADC_INT_ENABLE | ADC_INT_PRI_2);
} |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 傾僫儘僌擖椡妱傝崬傒娭悢 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 椺偊偽壒惡偱偁傟偽40Khz掱搙偺僒儞僾儕儞僌廃攇悢偱偡偺偱丄傕偟偦偺昿搙偱妱傝崬傔偽丄張棟帪娫偼25usec掱偵側傝傑偡丅偲偄偆偙偲偼C尵岅偱尒偰悢僗僥僢僾偟偐幚峴偱偒側偄丅偟偐偟丄ADC偼嵟戝16屄偺僶僢僼傽傪帩偭偰偄傞偺偱丄偙傟傪巊梡偡傟偽1寘傎偳梋桾偑弌偰偔傞丅 偦傟偱傕丄僞僗僋偵僨乕僞傪憲怣偡傞梋桾偼柍偄偺偱丄僟僽儖僶僢僼傽偱僞僗僋偲偺僨乕僞偺庴偗搉偟傪峴偆丅 僶僢僼傽偑FULL偵側傞偲乮僽儘僢僋偟偰偄傞乯奩摉僞僗僋傊僶僢僼傽傪巜掕偟偰僔僌僫儖乮懸偪峴楍乯傪憲怣偡傞丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
__attribute__((far)) extern short dbuff[2][256];
void __attribute__((interrupt, no_auto_psv)) _ADC1Interrupt(void)
{
static short AnIdx=0;
static short AnSel=0;
portBASE_TYPE xHPTaskWoken;
xFFTMessage xFFT;
int i;
IFS0bits.AD1IF = 0; /* 妱傝崬傒僋儕傾 */
if (AnIdx >= N){
xFFT.fftSel = AnSel;
xHPTaskWoken = pdFALSE;
xQueueSendFromISR( xFFTQueue, &xFFT, &xHPTaskWoken );
if( xHPTaskWoken ) {
/* |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| PWM | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 丂PIC24FJ64GA002偼俆們倛偺16Bit Compare/PWM 弌椡傪帩偭偰偄傑偡丅偙傟傪巊偭偰婥寉偵僷儖僗暆曄挷偑弌棃傑偡丅偙偙偱偼PWM廃攇悢偲偟偰壒惡傕嵞惗偱偒傞100khz傪慖戰偟傑偡丅側傫偐丄偡偛偄帠偵側偭偰偄傑偡丅 曄挷帺懱偼懠偺僞僗僋摍偺僞僀儈儞僌偱峴偄傑偡偺偱丄偙偙偱偼僪儔僀僶偺傒傪愢柧偡傞丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
#include "timer.h"
#include "outcompare.h"
/*
僷儖僗暆曄挷弶婜壔愝掕娭悢
*/
int pwm_setup(void)
{
/* 僞僀儅2傪撪晹僋儘僢僋16MHz丄僾儕僗働乕儔侾丄
PWM廃婜160(=100khz)丂PWM廃婜偼PR2偵婰壇偝傟傞
*/
OpenTimer2(T2_ON | T2_PS_1_1 | T2_SOURCE_INT, 160-1);
/* pin妱晅 */
RPOR2bits.RP4R = 18; /*OC1 -> RP4*/
/* OC1傪PWM儌乕僪偱弶婜壔 */
OpenOC1(OC_TIMER2_SRC | OC_PWM_FAULT_PIN_DISABLE, PR2+1, 0);
RPOR2bits.RP5R = 19; /*OC2 -> RP5*/
OpenOC2(OC_TIMER2_SRC | OC_PWM_FAULT_PIN_DISABLE, PR2+1, 0);
} |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 丂曄挷僗僥乕僩儊儞僩偺椺偲偟偰壒惡傪庢傝崬傒偦偺傑傑PWM弌椡偡傞椺傪壓偵帵偡丅ADC偺侽ch偐傜UnSigned10bit僨乕僞乮MAX1024)傪撉傒崬傒丄僞僀儅俀偺PWM廃婜乮PR2)偱惓婯壔偟傑偡丅側偍丄偙偺寁嶼偼16bit偩偲僆乕僶乕僼儘乕偡傞偺偱long偵僉儍僗僩偟偰寁嶼偡傞丅 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
SetDCOC1PWM((long)(PR2+1)*ReadADC10(0)/1024); |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| UART | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
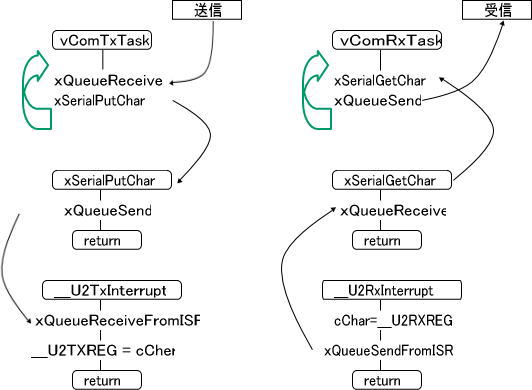
| PIC24FJ64GA002偼UART2ch傪帩偭偰偄傑偡丅 僐儞僜乕儖偼PIC偱偼堦斒揑偵LCD傪巊偆傛偆偱偡偑丄奜晅偗晹昳傪嵟彫偵偟偰嶌傞偲偄偆僐儞僙僾僩偐傜丄UART傪僐儞僜乕儖偵巊梡偡傞丅 側偍丄儗儀儖僐儞僶乕僞偑昁梫偱偁傞偑丄MAX202偱嶌偭偨僐儞僶乕僞傪働乕僽儖懁偱梡堄偟偨丅 曋棙側偺偱堦偮帩偭偰偄傞偲曋棙偱偡丅
僞僗僋峔惉偼僨儌僾儘僌儔儉(comtest.c乯偦偺傑傑偱偡丅偙傟偵憲怣梡媦傃庴怣梡懸偪峴楍傪晅偗壛偊偰丄憲庴怣僞僗僋偲偟偰偄傑偡丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 媈栤側傫偱偡偑丵U2TXInterrupt偱1暥帤憲弌枅偵妱傝崬傓愝掕偵側偭偰偄傞丅僉儏乕偵僨乕僞偑柍偄応崌摍丄埲屻妱傝崬傒偑妡偐傜側偔側傝偦偆偱偡偑丒丒丒 幚偼倶SerialPutChar偺倶QueueSend()偺屻傠偱彫嵶岺偟偰妱傝崬傒傪敪惗偡傞傛偆偵偟偰偁傝傑偡丅偦傟偱梋寁側xserialPut/GetChar()偑偼偄偭偰偄傑偡丅乮serial.c傪嶲徠乯 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
xQueueHandle xComTxQueue;
xQueueHandle xComRxQueue;
#define ComRxQUEUE_SIZE 16
#define ComTxQUEUE_SIZE 3
/*-----------------------------------------------------------*/
void vAltStartComTasks( unsigned portBASE_TYPE uxPriority, unsigned long ulBaudRate,
unsigned portBASE_TYPE uxLED )
{
/* 億乕僩偺弶婜壔 */
xSerialPortInitMinimal( ulBaudRate, comBUFFER_LEN );
xComTxQueue = xQueueCreate( ComTxQUEUE_SIZE, sizeof( xComTxMessage ) );
xComRxQueue = xQueueCreate( ComRxQUEUE_SIZE, sizeof( xComRxMessage ) );
/* 僞僗僋傪惗惉偡傞丅Tx偺桪愭搙偼Rx傛傝掅偔愝掕偡傞丅 */
xTaskCreate( vComTxTask, ( signed char * ) "COMTx", comSTACK_SIZE,
NULL, uxPriority - 1, ( xTaskHandle * ) NULL );
xTaskCreate( vComRxTask, ( signed char * ) "COMRx", comSTACK_SIZE,
NULL, uxPriority, ( xTaskHandle * ) NULL );
}
/*-----------------------------------------------------------*/
/*丂UART憲怣僞僗僋丂*/
static portTASK_FUNCTION( vComTxTask, pvParameters )
{
signed char cByteToSend;
portTickType xTimeToWait;
xComTxMessage xMessage;
portCHAR *pcstring;
for( ;; ){
while( xQueueReceive( xComTxQueue, &xMessage, portMAX_DELAY ) != pdPASS );
pcstring = xMessage.pcMessage;
while(*pcstring){
xSerialPutChar( NULL/*xPort*/, *pcstring++, comNO_BLOCK );
}
}
}
/*lint !e715 !e818 pvParameters is required for a task function */
/* even if it is not referenced. */
/*-----------------------------------------------------------*/
/*丂UART庴怣僞僗僋丂*/
static portTASK_FUNCTION( vComRxTask, pvParameters )
{
signed char cExpectedByte, cByteRxed;
portBASE_TYPE xResyncRequired = pdFALSE, xErrorOccurred = pdFALSE;
xComRxMessage xMessage;
for( ;; ){
/*丂侾暥帤擖椡屻柍忦審偵懸偪峴楍偵弌椡偡傞丅庴怣僞僗僋偑柍偗傟偽丄
偙偺儖乕僾偼偄偢傟僽儘僢僋偡傞丅丂*/
xSerialGetChar( xPort, &cByteRxed, comRX_BLOCK_TIME );
xMessage.pcMessage = &cByteRxed;
xQueueSend( xComRxQueue, &xMessage, portMAX_DELAY );
}
} |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 僞僀儅乕妱傝崬傒 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 丂僞僀儅乕妱傝崬傒偺椺偲偟偰壒惡僨乕僞偺弌椡僞僀儈儞僌偺敪惗傪庢忋偘傞丅 壒惡僨乕僞傪40khz偱PWM弌椡偡傞丅杮棃偼儕儞僌僶僢僼傽傪峔惉偡傞偺偱偁傞偑丄40khz偱偼嵟戝偱25usec掱偺妱傝崬傒張棟帪娫偟偐柍偄偺偱丄傑偲傕側僶僢僼傽偼峔惉偱偒側偄丅 丂堦斒偵丄偙偺條側応崌僔儕傾儖僀儞僞乕僼僃乕僗傪帩偮MCP4922摍偲SPI傪巊梡偡傞偲巚偆丅SPI偼FIFO偑偁傝丄偦偺暘梋桾偑惗傑傟傞偺偱丄僶僢僼傽峔惉傕怓乆峫偊傜傟傞丅 丂偙偙偱偼壒惡擖椡媦傃偦偺張棟偲摨婜偟偰弌椡僨乕僞偑惗惉偝傟傞偺偱丄偙傟傪扨弮偵擖弌椡偑摨婜偟偰偄傞偲偟偰惂屼側偟偱巊梡偡傞丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
/**************************
* 僞僀儅乕弶婜壔愝掕娭悢
***************************/
int timer_setup(void)
{
/*丂壒惡弌椡梡丂*/
/* 僞僀儅4偺弶婜愝掕丂僾儕僗働乕儔1/8丂撪晹僋儘僢僋丂16Mhz/8/50=40kc丂*/
OpenTimer4(T4_ON | T4_PS_1_8 | T4_SOURCE_INT, 50-1);
ConfigIntTimer4(T4_INT_PRIOR_2 | T4_INT_ON);
}
/***************************
丂 壒惡梡timer妱傝崬傒張棟
****************************/
void __attribute__((interrupt, shadow)) _T4Interrupt(void)
{
/*丂捛偭偐偗傞傛偆偵嵞惗偡傞偨傔丄彮偟庤慜偐傜僗僞乕僩偡傞*/
static short PlayIdx=480;
IFS1bits.T4IF = 0; /* 妱傝崬傒僋儕傾 */
PlayIdx &= 0x1ff;
/* PWM弌椡傪峴偆丂*/
SetDCOC1PWM((long)(PR2+1)*x[PlayIdx++]/1024);
} |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 僜乕僗偲僾儘僕僃僋僩僼傽僀儖 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 丂MPLAB傪僨僼僅儖僩偱僀儞僗僩乕儖偟偨応崌丄廃曈婡婍偺僿僢僟偼 C:\Program Files\Microchip\MPLAB C30\support\peripheral_24F 偵偁傝丄僪儔僀僶偼 C:\Program Files\Microchip\MPLAB C30\src\peripheral_24F\libpPIC24F\pmc 偵偁傝傑偡丅 偟偐偟丄偁傑傝偵戝検偱偁傝丄偐偮嵶暘壔偝傟偰偄傞偺偱昁梫側傕偺傪僇儗儞僩僨傿儗僋僩儕傊揮憲偟偰巊梡偟偰偄傑偡丅 丂偙傟傜偼Lib宍幃偵偟偰巊梡偡傟偽庤娫偑柍偄偺偱偡偑丄戝婯柾側僾儘僌儔儉偱柍偄尷傝丄僜乕僗丒僨僶僢僌傪壜擻偵偟偰偍偔偺偑摼嶔偩偲巚偆丅 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 姶憐 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 丂儕僜乕僗偺彮側偄CPU偺RTOS偼僾儕儈僢僥傿僽側API傪帩偮傕偺偑朷傑偟偄偲峫偊偰偄偨丅FreeRTOS偼傛傝彫偝側妀傪帩偪丄偦偺忋偱丄彮側偄儕僜乕僗傪妶梡偟傛偆偲偟偰偄傞偲尒傜傟傞丅偟偐偟丄僋儕僥傿僇儖側応柺偱偼丄傑偩摦嶌偑廳偄丅偦偺傛偆側帪偼丄扨弮側妱傝崬傒張棟偲偐傾僢僙儞僽儔傪巊偊丄偲偄偆偙偲側偺偩傠偆丅偟偐偟丄100%偺晧壸傪梌偊偰傕丄傕偔傠傒捠傝偺摦嶌傪偗側偘偵傕偙側偟偰偄傞偺偵偼偪傚偭偲姶怱偟偨丅偍偦傜偔僆乕僶僿僢僪偲婡擻偺僶儔儞僗偼椙偄偲偙傠偵偁傞偺偱偼側偄偩傠偆偐丅 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 丂44khz偺壒惡傪乮搑拞FFT傒偨偄側廳偄張棟傪擖傟偰乯庢傝埖偍偆偲巚偭偨偑丄寢嬊16Khz乣20khz偑尷奅偩偭偨丅庡偵丄偦偺廃攇悢偱偺妱傝崬傒張棟傪昁梫偲偡傞壒惡弌椡偱偺CPU儕僜乕僗偺徚旓検偩偭偨丅僠僢僾撪偱慡偰張棟偡傞偺偱偁傟偽摉慠偩偲巚偆丅堦斒揑偵偼SPI婡擻偲SPI傪帩偮DA僐儞僶乕僞乕傪巊偆偺偱偁傠偆丅偦偺応崌傕偆彮偟張棟廃攇悢傪忋偘傞偙偲偑弌棃傞丅 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| PIC偼埖偄擄偄偲偺愭擖娤傪帩偭偰偄偨偑 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| 偛堄尒偛幙栤偼偙偙 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Guest No. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||